
通信原理(一)
雷达原理(第一章绪论)
视频链接:7.P7 雷达原理 绪论(七)_哔哩哔哩_bilibili
书籍:《雷达原理第六版》丁鹭飞
前言
信息对抗:
- 雷达对抗
- 通信对抗
- 网络对抗
- 光电对抗
radar:radio detection and ranging(无线电探测和测距)
发射的是电磁波信号,返回的是回波,根据回波信号探测物体的位置
雷达在生活中的举例:导航雷达、气象雷达、测距雷达
雷达的任务:
- 早期:测距
- 现代:测距、角度、速度、形状
概念
雷达探测目标原理如下:
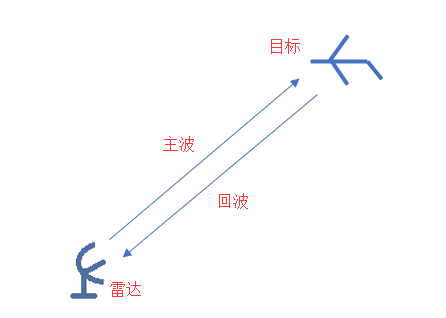
雷达是利用目标对电磁波的反射现象来发现目标并测定其位置的。雷达发射机产生射频信号,经雷达发射天线辐射到空间,当电磁波遇到目标发生反射,回波信号经雷达接收天线,到达接收机,经接收机处理后,送给信号处理机进行处理,获得目标参数:距离、方位、速度和形状等。
雷达组成
- 雷达的基本组成:
天线(发射天线、接收天线):发射信号,接收回波
发射机:产生射频信号
雷达发射的信号一般可分为连续波信号和脉冲信号。
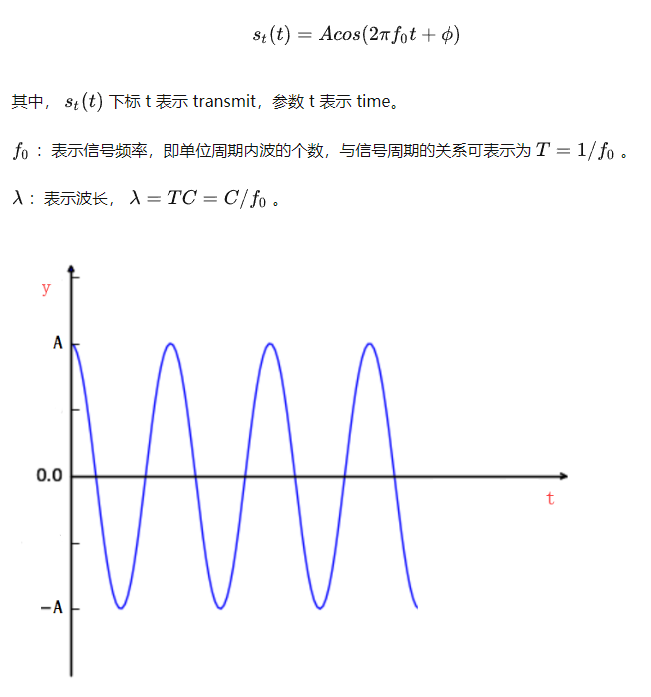
连续波信号
脉冲信号
发射信号(主波):

回波信号:
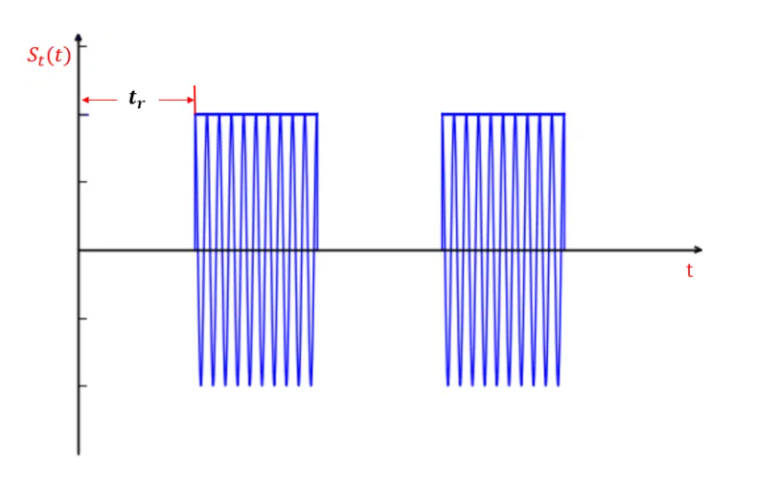
其中,图片的纵轴应为Sr(t),r代表receive,意为回波信号;tr为回波滞后于发射信号的时间,称为时延。
接收机:接收回波信号,并进行处理。一般会经历射频 -> 中频 -> 视频的处理过程。
接收机收到的是射频信号,频率本来就比较高,如果直接在射频上进行采样,根据奈奎斯特采样定理,采样频率需要大于信号频率的两倍,才能将采样后的信号无失真的还原回去。直接在射频上进行采样,成本就会很高,所以就需要对射频信号进行混频处理,变到中频,这样对采样率的要求就降低了。
所谓混频,从数学上讲就是求频率差。
- fR表示射频信号对应的频率,R 表示 receive;
- fL表示本振信号对应的频率,L 表示local;
- fI表示中频信号对应的频率。
视频是在中频的基础上经过包络检波处理(取包络),就得到视频信号,需要注意的是只能取一侧的包络。
关于中频回波信号详细推导可参见:雷达中的射频、中频、视频信号 - 灿影之晶 - 博客园 (cnblogs.com)
信号处理机:提取目标的各种信息(测距、角度、速度、形状),奈奎斯特采样定理,混频(求频率差)。把要处理的信号分成三个波段:射频、中频、视频。信号处理机所能处理的是数字信号,这就需要对模拟信号进行采样[奈奎斯特采样定理]。理论上,一方面我们希望采样点越少越好,同时又希望尽可能将信号对应的信息都保留下来。根据奈奎斯特采样定理,只要采样频率大于信号频率的两倍,就可以将采样得到的信号,无失真的还原回去。
- 终端显示设备:将雷达探测到的目标信息,以可视化的方式显示到屏幕上。
- 伺服系统、同步设备
- 伺服系统:控制天线转动,使天线指向不同角度,以探测不同方位的目标。
- 同步设备:雷达的频率和时间标准。产生各种频率振荡;提供统一的时钟。
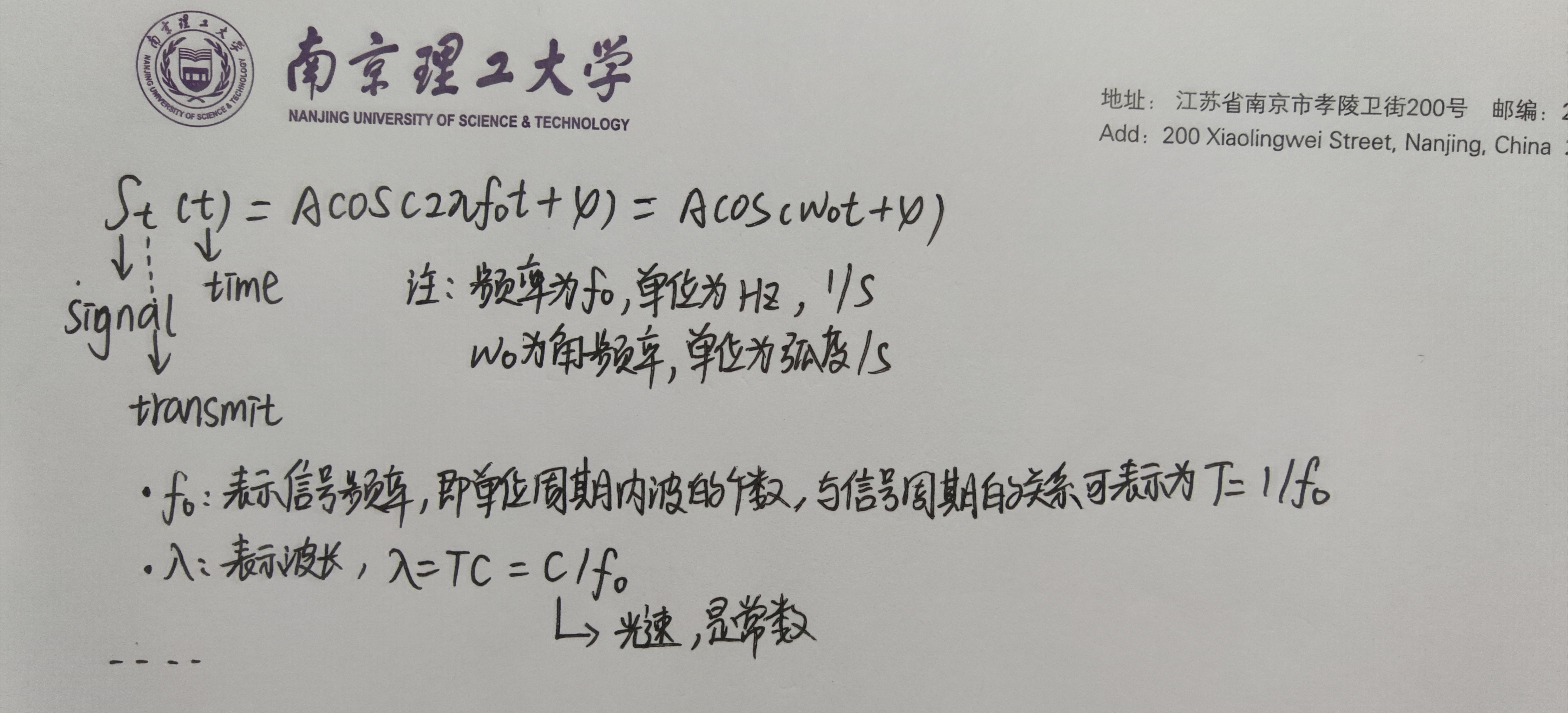
磁波的信号一般为正弦函数或者是余弦函数,只是初始相位差90度,公式如下:
目标参数的测量
距离测量
坐标系(球坐标系、柱坐标系)
球坐标系(极坐标系)
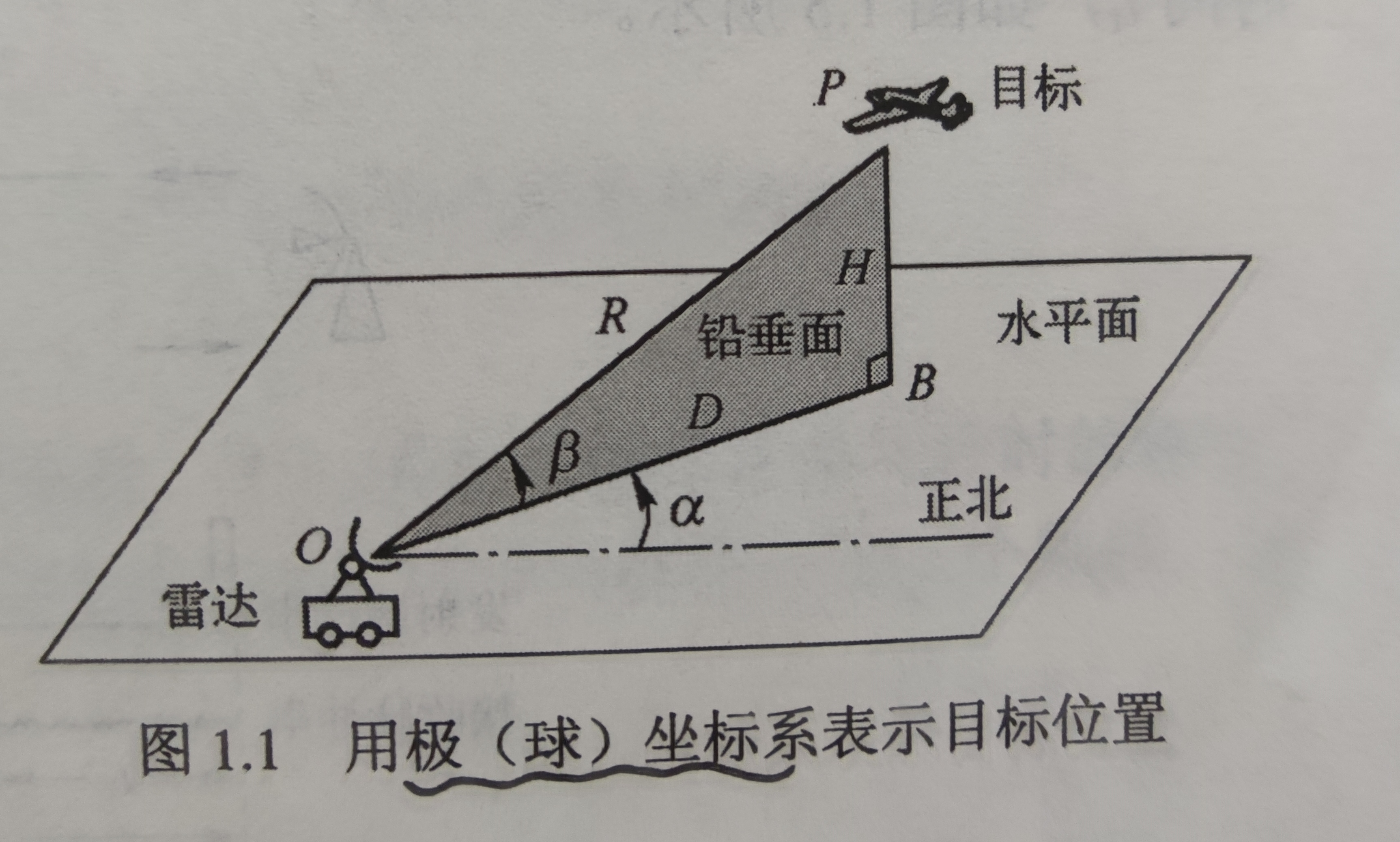
空间中,任一目标P所在位置可以用下列三个坐标值确定:
- 目标的斜距R:雷达到目标的直线距离OP,常称为径向距离
- 方位角α:目标斜距R在水平面上的投影OB与某一起始方向在水平面的夹角,常以正北作为参考。取值范围为:0°-360°
- 俯仰角β:斜距R与它在水平面上的投影OB在铅锤面上的夹角,有时也叫倾角或高低角。就相对雷达波束指向而言,上视叫仰角,下视叫俯角。取值范围为:-90°-90°
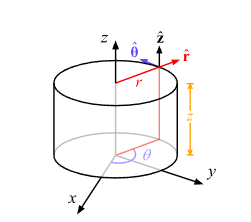
柱坐标系
柱坐标系如图所示,可用三个变量(r,θ,z)描述空间任意一点:
- r:目标到Z轴的距离
- θ:目标与x轴的夹角
- z:目标的高度
距离测量
距离测量的示意图如图所示:
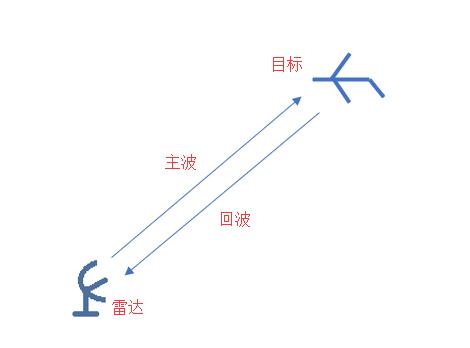
脉冲信号测距公式:
其中,tr为主波和回波之间的时间差。连续波信号也可以测距,但是和脉冲信号测距原理不同调频法测距。
常见的距离换算
| K | M | G | m | μ | n | p |
| —— | —— | —— | ——- | ——- | ——- | ——— |
| 10^3 | 10^6 | 10^9 | 10^-3 | 10^-6 | 10^-9 | 10^-12 |1000yd(码)=3000ft(英尺)=0.914km≈0.6nmile(海里)
1nmile=1.853km
角度测量
角度测量值得是测量方位角或仰角,在雷达技术中测量这两个角位置有两个前提:
- 电磁波是直线传播的
- 雷达天线具有方向性
天线分为两类:
- 各向异性天线(有方向性天线)
- 各向同性天线(无方向性天线)
有方向性天线相对于无方向性天线来说,在某个方向上的功率较大,其他方向上的功率较小,无方向性天线是指到各个方向径长相等,在平面上就是一个以天线为圆心的圆,各个方向的增益都是1.
天线方向图
定义:天线的方向性是指天线向一定方向辐射电磁波的能力。对于接收天线而言,方向性表示天线对不同方向传来的电磁波具有不同的接收能力。天线的方向性通常用方向图来表示。典型雷达天线方向图如下:
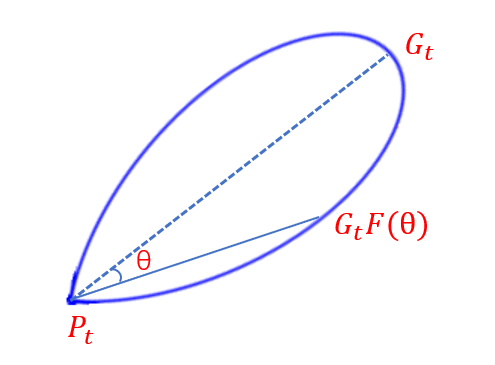
- Pt:发射机功率
- Gt:最大增益
- GtF(θ):与最大增益方向夹角为θ的方向对应的增益
假设G=GtF(θ)表示天线增益,则天线辐射到空间中的功率为PtG
如何获得天线方向图呢?
通过测量得到。电磁场看不见,摸不着。天线哪个方向增益大,哪个方向增益弱,是在天线设计的时候通过试验测得的。
天线的辐射方向图,简称方向图,其辐射特性可采用三维和二维方向图来描述。三维方向图可分为球坐标三维方向图和直角坐标三维方向图;二维方向图是由其三维方向图取某个剖面得到的,又分为极坐标方向图和直角坐标方向图。
直角坐标系表示的方向图
在方向图(又称波瓣图)中,包含所需最大辐射方向的辐射波瓣叫天线主波瓣,也称天线波束。主瓣之外的波瓣叫副瓣或旁瓣、边瓣,主瓣相反方向上的旁瓣叫后瓣、尾瓣。
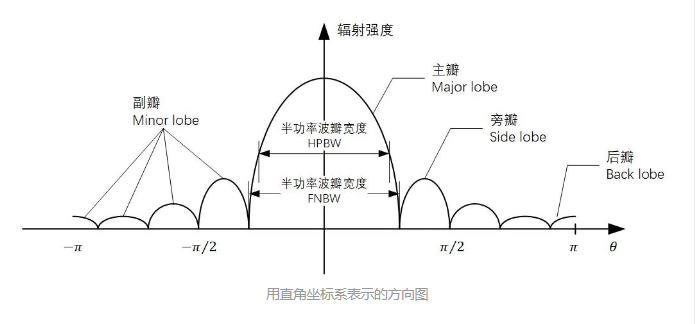
天线在某个方向上的增益是通过天线方向图来确定的。增益就是指有方向性天线相对于无方向性天线,在某个方向上功率增加的倍数。这个倍数可能大于 1 [主瓣方向],也可能小于 1 [副瓣方向]。从能量守恒的角度来讲,主瓣获得的功率增益,是以牺牲副瓣增益得到的。
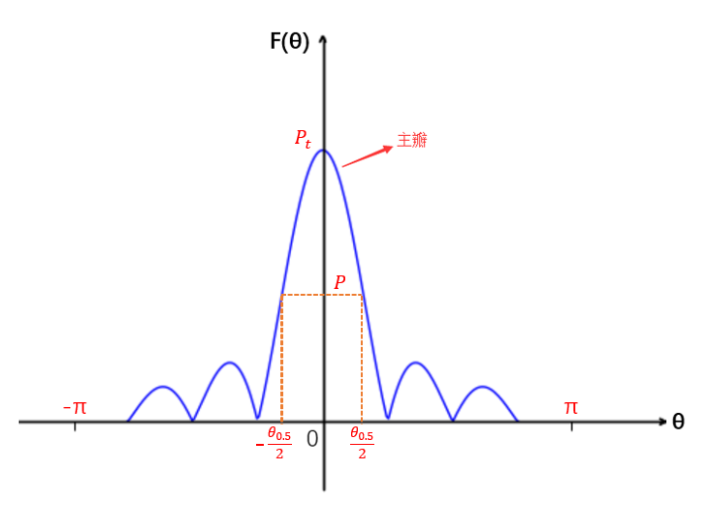
波束宽度:主瓣的宽度称为波束宽度,是衡量天线方向图胖瘦的指标。定义为主瓣功率下降到波束中央 1/2 功率处的宽度。用分贝表示的话,1/2 是 -3dB。因此,又称为 3dB 波束宽度。
分贝:分贝dB定义为两个数值的对数比率,这两个数值分别是测量值和参考值(也称为基准值)。存在两种定义情况:
功率之比:
其中w0为功率的参考值,-3dB是指功率变为原来的1/2,10lg0.5= -3,-3dB在10进制中等同于0.5;下降3dB也就是功率下降一半,-3dB点指的是半功率点。
幅值之比:
其中x0为幅值的参考值.-3db是指幅度变为原来的(根号2)/2,就是0.707倍,20lg((根号2)/2)= -3。
极坐标系表示的方向图
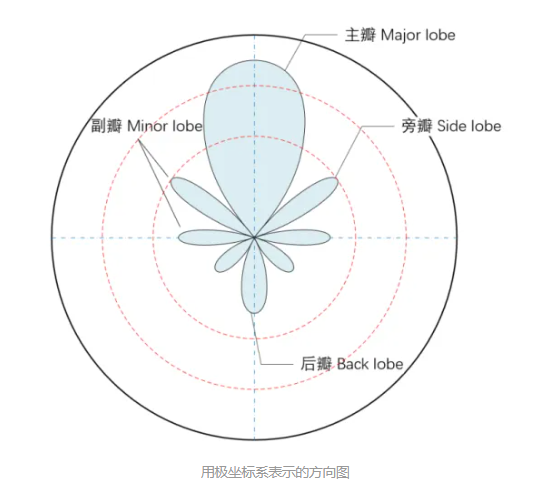
主瓣单调性:与最大增益方向夹角越大,增益越小。只在主瓣范围内有效。
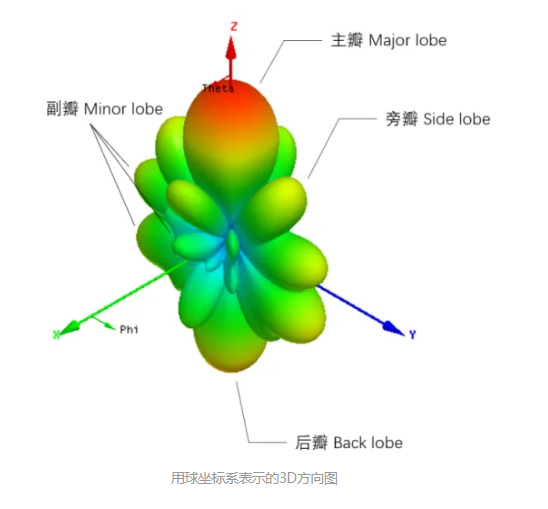
球坐标系表示的3D方向图
天线增益
方向性系数
用来表征天线辐射能量集中程度的一个参数。在相同辐射功率Pr的条件下,某天线在给定方向的辐射强度与理想点源天线在同一方向的辐射强度的比值。一般情况下,方向性系数均指最大辐射方向的方向性系数。
天线增益
在相同输入功率Pin的条件下,实际天线与理想点源在空间同一点处所产生的信号的功率密度之比。它定量地描述一个天线把输入功率集中辐射的程度,是用来衡量天线朝一个特定方向收发信号的能力。
注意到,增益的定义与方向性系数的定义条件是不同的,方向性系数是以辐射功率为定义,没有考虑天线的能量转换效率;增益是以天线的输入功率为定义。
增益与天线方向图有密切的关系,方向图主瓣越窄(能量辐射越集中),副瓣越小(能量分散越少),增益越高。极坐标图多用于表征中低增益,即波瓣较胖的方向图;直角坐标多用于绘制高增益(窄波束、低副瓣)天线的方向图。
速度测量
多普勒效应
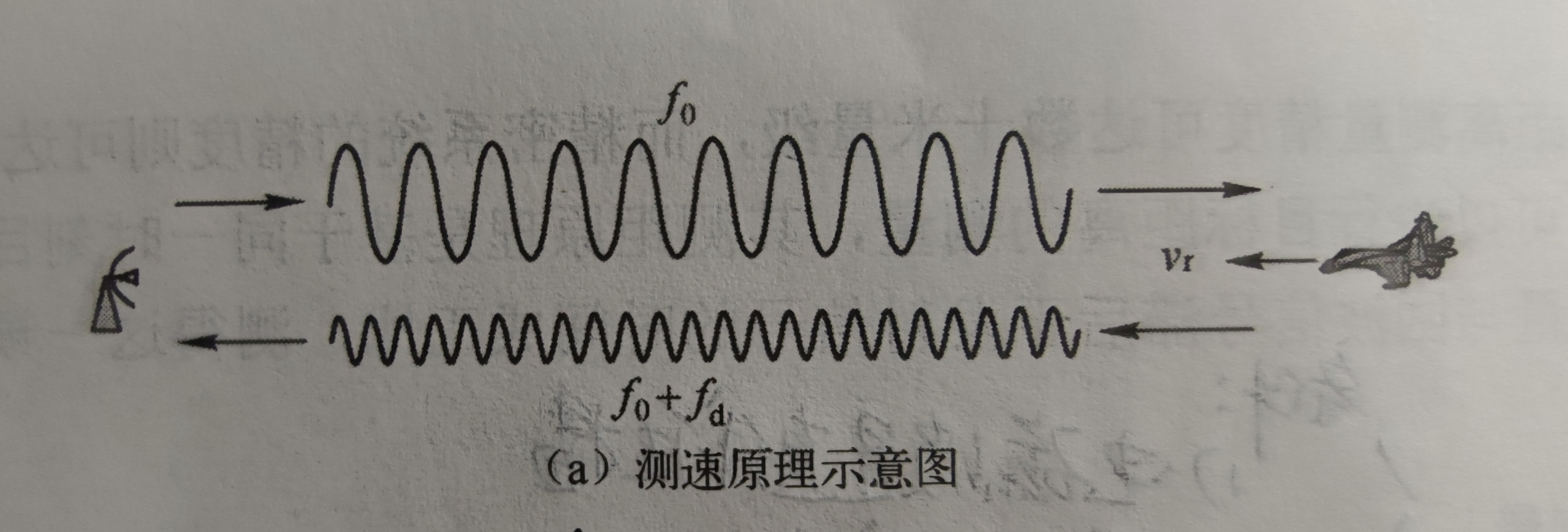
有些雷达除确定目标的位置外,还需测定运动目标的相对速度,例如测量飞机或导弹飞行时的速度。当目标与雷达站之间存在相对速度时,接收到回波信号的载频相对于发射信号的载频产生一个频移,这个频移在物理学上称为多普勒频移,其数值为:
其中,
- vr为雷达与目标之间的径向速度,单位为m/s
- λ为载波波长,单位为m
- fd为多普勒频移,单位为HZ(赫兹)
如图所示,当目标向着雷达站运动时,vr>0,回波载频提高;反之,回波载频降低。雷达只要能够测量出回波信号的多普勒频移,就可以确定目标与雷达站之间的相对速度。
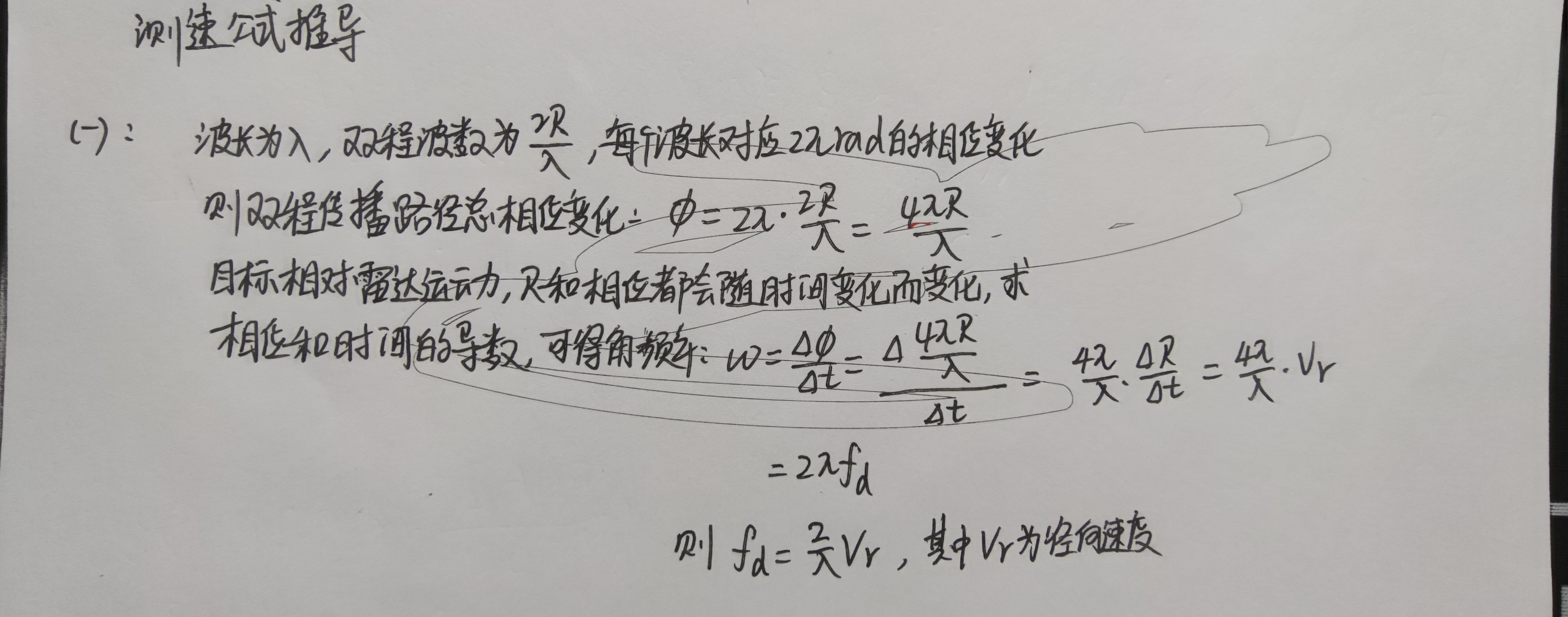
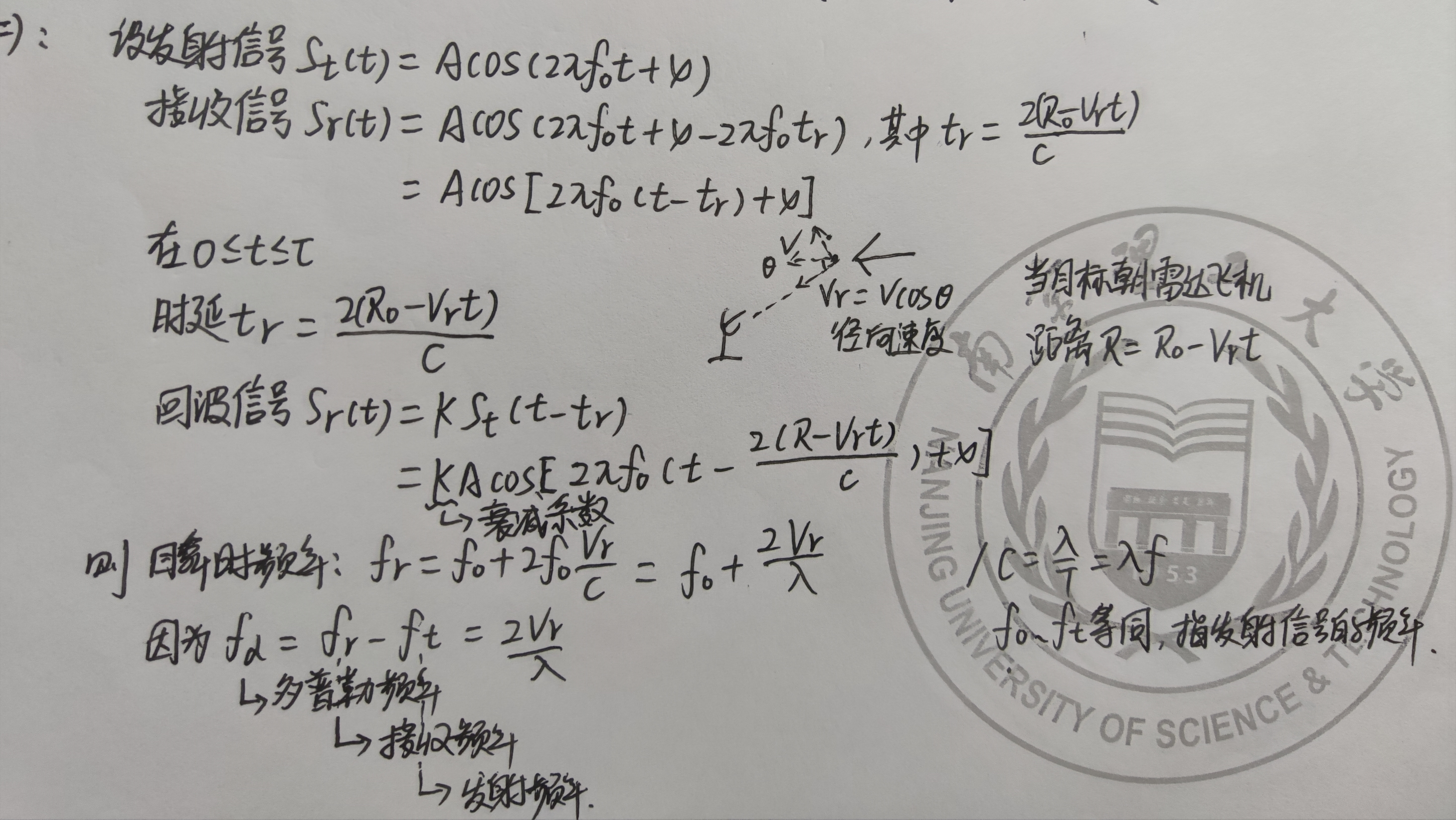
测速公式推导
理解各种频率
由于在后续推导过程中运用了一些频率、角频率相关知识点,所以为了便于理解,先对此重新温习一下。
- 模拟频率f:是单位时间内完成周期性变化的次数,即每秒经历过多少个周期,单位为HZ,符号为1/s
- 模拟角频率Ω:每秒经历多少弧度,单位rad/s
- 数字频率w:每个采样点间隔之间的弧度,单位rad(采样点就是模拟转为数字时的采样点)
下面通过一张图片解释他们之间的关系:
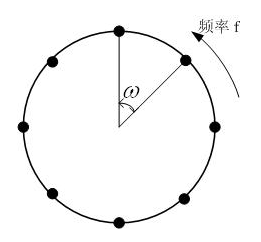
以转一圈为周期(即从一点出发,转一圈刚好又回到这个点,这就是一个周期)
f代表1s转了多少圈(即1s重复了多少周期)
Ω代表1s转了多少弧度(即1s转过的角度转为弧度)
w表示一个采样间隔是多少弧度
此外,需要还知道两个结论:
- 相位对时间求导是瞬时角频率,
- 瞬时频率还应该再除以2π
详细推导过程
方法一
方法二
目标形状测量
SAR合成径向雷达 Synthetic Aperture Radar
SAR雷达一般装在运动的载体上,比如飞机、卫星等,对地面目标成像。google earth就是这个原理。
ISAR逆合成径向雷达 Inverse Synthetic Aperture Radar
这两个统称成像雷达ISAR雷达一般在地面相对静止的载体上,对空中的飞机,海面的舰船等目标成像。
基本雷达方程
基本雷达方程也叫最大作用距离方程,雷达探测目标过程如图所示:
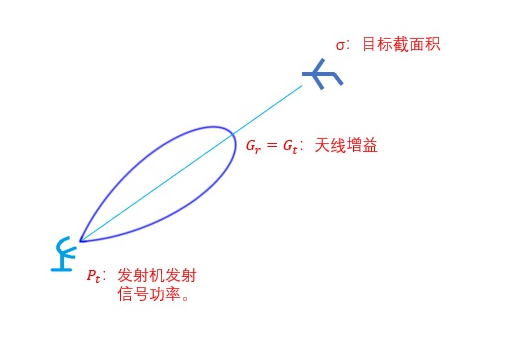
其中相关参数如下:
- Pt:雷达发射机发射信号的功率
Gt:发射天线增益,这里假设目标与雷达天线的连线正好穿过天线方向图最大增益处。
Gr:接收天线增益,如果天线为收发共用,Gt=Gr
- σ:表示 RCS(radar cross section),目标雷达截面积,代表入射电磁波照射到目标上之后发射回来的电磁波的大小。隐身飞机就是将 σ 做的很小。当雷达电磁波照射到目标上之后,反射回来的电磁波功率很弱,就达到了目标对雷达隐身的目的。
假设电磁波反射回来之后,经过接收天线主瓣最大值(接收天线方向图最大增益为Gr,接收机接收到的信号功率就等于反射回来的信号功率乘以接收天线增益Gr。此时,接收机能否检测到信号跟Simin有关。 Simin表示接收机灵敏度,单位:瓦。
如果满足:
表示雷达可以探测到目标。‘
基本雷达方式公式推导
对于无方向天线,雷达发射机向各向均匀辐射,设雷达发射机功率为Pt,则距离雷达R处的入射功率密度为:
单位:瓦/m2,其中,4πR2表示球体面积(对于无方向天线而言,其天线方向图就是一个球体)
实际上,雷达总是使用定向天线将发射机功率集中辐射于某些方向上。天线增益Gt用来表示天线在辐射方向上功率增加的倍数。因此,当发射天线增益为Gt时,距离雷达R处目标所照射到的功率密度为:
目标截获了一部分照射功率并将它们重新辐射于不同的方向。用雷达截面积σ来表示被目标截获照射功率后再次辐射回雷达处功率的大小:
单位:瓦。需要注意的是,对于同一个目标来说 σ 不是一成不变的,它表示目标被雷达“看见”的尺寸,不同方位的 σ 并不相同。
目标的反射信号到达接收天线处的功率密度:
雷达接收天线只收集回波功率的一部分,设天线的有效接收面积为Ar,则雷达收到的回波功率Pr为:
根据天线理论(天线相关的知识,不用管怎么来的,直接用结论),Ar与天线增益Gr</Sub>的关系为:
同理,At与天线增益Gt</Sub>的关系也是如此。
所以有:
当Pr= Simin时,R就取得最大值:
以上公式中,所有变量均为国际标准单位。
雷达的应用与发展
雷达的工作频率
雷达的工作频率
常用的工作频段范围 220M~35GHz(射频)
L波段 波长22cm 范围为20~25cm
S波段 波长10cm
C波段 波长5cm
X波段 波长3cm 频率为10GHz
ku波段 波长2.2cm
ka波段 波长8mm雷达的应用
a. 军用:预警雷达、警戒雷达、引导指挥雷达、火控雷达、战场监视雷达、测高雷达、近炸引信
b. 民用:气象雷达、航管雷达、遥感雷达、宇航雷达雷达的信号分类、发展
a. 分类
连续波信号、脉冲波信号
b. 发展
脉冲压缩体制(PC)、合成孔径雷达(SAR)、逆合成孔径雷达(ISAR)、脉冲多普勒雷达(PD)
电子战与军用雷达
电子战定义
电子战(EW): Electronic War,敌我双方利用无线电电子装备或器材所进行的电子信息斗争,电子战包括电子对抗和电子反对抗。
电子对抗(ECM ):Electronic counter measurement,为了探测地方无线电电子设备的电磁信息,削弱和破坏其使用效能,所采取的一切战术和技术的总称。可分为:电子侦察、电子干扰、电子隐身和伪装、电子摧毁。
电子反对抗(ECCM): Electronic counter counter measurement
在地方实施电子对抗的条件下,保证我方有效的使用电磁信息,所采取的一切战术和技术的总称。电子反对抗包括电子反侦察、电子反干扰、反隐身和反摧毁
雷达的抗干扰技术
a. 与天线有关的抗干扰技术:SLB旁瓣消隐、SLC旁瓣相消
b. 与发射机有关的抗干扰技术:发射信号功率、发射信号的变化;
c. 与接收机有关的抗干扰技术:PC
d. 反隐身:多基地雷达(目标从不同方向反射的 RCS 不同)。